
这是一款轮腿式机器人 Ollie,别名“轮滑小子”。其拥有感知接触能力,可感知并识别包括触碰位置、触碰轨迹、触碰力度、触碰方式等在内的来自外界的接触信息,并作出对应的反应。
同时,它还具有稳定的运动能力,不仅能够灵活地完成双轮迈步,还能完成用头部操控球形物体,用下半身确保稳定行驶的高难度搬运任务。

图 | 双轮迈步(来源:资料图)
图 | 完成高难度搬运任务(来源:资料图)

新增触觉传感器,丰富机器人感知世界的能力
正如人类在与环境的互动中需要五种基本感官——视觉、触觉、听觉、嗅觉和味觉——共同发挥作用,机器人要想拥有更高的感知世界并与之互动的能力,仅仅提高视觉与听觉水平是不够的,其触觉水平的提高也同样重要。
触觉水平提高的机器人会对人类更加有用。比如,帮人们打开一个瓶子而不会打破它。此外,高性能的触觉传感器还可以帮助机器人为人类提供包括物体形状、重量、刚度等在内的一些关键信息。
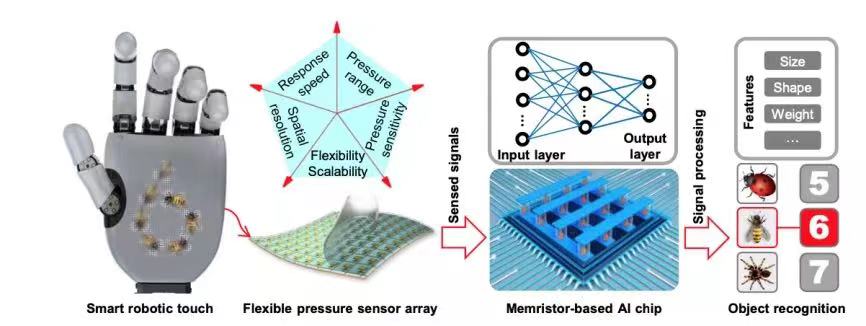
图|智能机器人智能触控系统的工作原理(来源:Large-Scale Integrated Flexible Tactile Sensor Array for Sensitive Smart Robotic Touch, ACS Nano)
Ollie 所搭载的触觉传感器是清华大学集成电路学院联合 Robotics X 实验室共同的具有高灵敏度、超大压力检测量程、超快响应速度柔性压阻薄膜,集成定制化的高空间分辨率、高速信号采集模块硬件系统,使机器人的触觉水平在机器人智能控制、人机交互方面达到了新高度。
同时,在触觉传感器硬件电路的研制中,团队在 4 英寸柔性聚酰亚胺衬底上研制出的 64×64 柔性晶体管基阵列电路,该阵列电路是基于单壁碳纳米管的薄膜晶体管有源矩阵,同自主研制的压阻薄膜集成,构建了空间分辨率 0.9 毫米(相当于每英寸 28.2 像素)高密度触觉神经网络系统。
相关论文以《用于灵敏智能机器人触觉感知的大规模集成柔性触觉传感器阵列》(Large-Scale Integrated Flexible Tactile Sensor Array for Sensitive Smart Robotic Touch)为题已被纳米科技领域国际顶刊 ACS Nano 所接收。
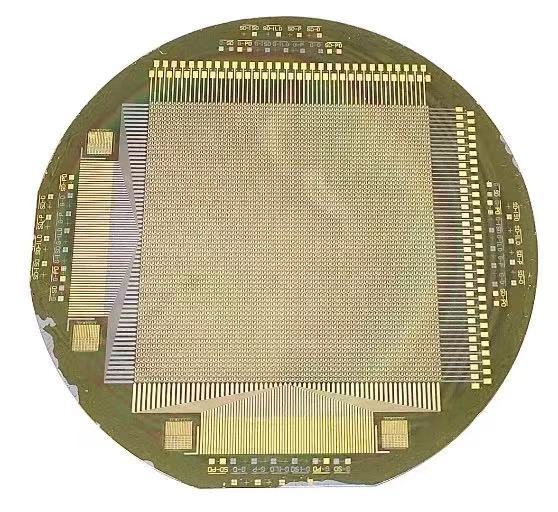

图|在从硅处理晶片上剥离之前与之后的具有 64×64 CNT TFT 的有源矩阵的照片(来源:Large-Scale Integrated Flexible Tactile Sensor Array for Sensitive Smart Robotic Touch, ACS Nano)
一般来说,柔性压力传感主要有三种类型:压电式、电容式和压阻式。这种触觉传感器属于压阻式传感器,有着结构简单、信号读取方便、检测范围广、成本低的优点。
在该领域中,采用了碳纳米管、纳米纤维等复合导电纳米材料和聚合物弹性体合成压阻薄膜最为先进,但是,由于导电纳米材料很难均匀地分散在弹性体中,所形成的聚合物弹性体合成压阻薄膜通常有着压力灵敏度相对较低(尤其是在>1000kPa 的高压范围)的缺点。
尽管有其他研究通过将表面处理成金字塔等各种微结构来增强其灵敏度,但由于这些微结构在压力下容易变形,所以这些方法均效果不佳。
该研究小组采用了碳纳米管导电纳米材料和聚合物弹性体合成压阻薄膜,各项性能指标均高于目前国际产学研水平,灵敏度最高可至 385kPa-1,响应速度为 3ms/5ms,检测范围达到 1400kPa,并表现出优异的线性度,更重要的是,它的可循环性十分出色,超过 3000 次循环表现也不会恶化,非常适合产品化。
各个参数的聚合物弹性体合成压阻薄膜薄膜系列表现出不同的特征,可广泛应用于不同的触觉场景,良好的线性度进一步降低了软件运算难度。
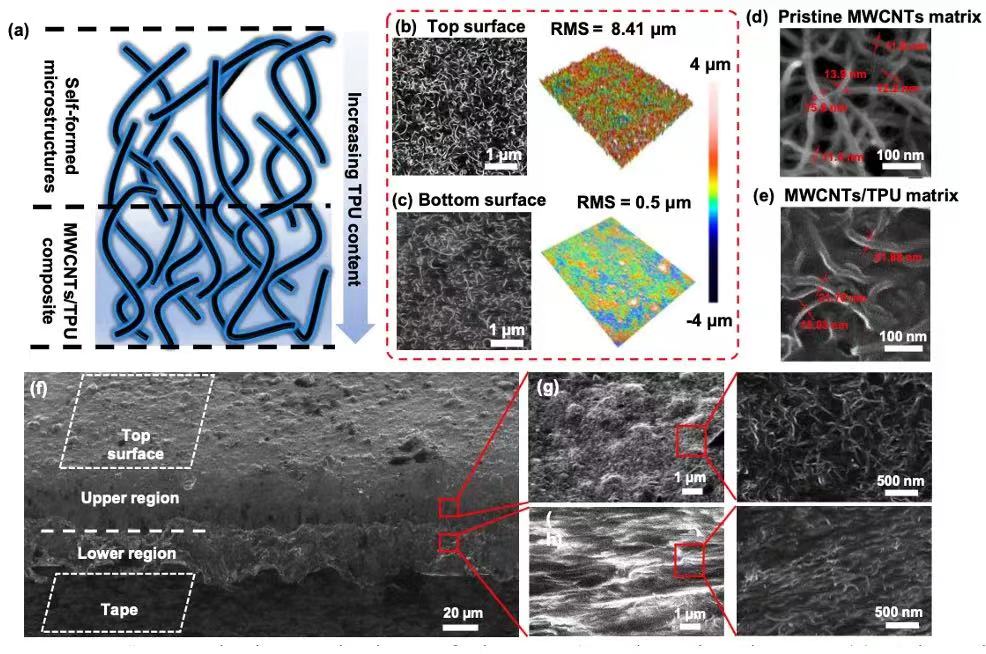
图|采用了 MWCNTs/TPU 的高性能聚合物弹性体合成压阻薄膜的结构表征(来源:资料图)
使用氦离子显微镜和共聚焦激光扫描显微镜,对该材料进行详细的结构分析后可以发现,新的聚合物弹性体合成压阻薄膜之所以有如此出色的压力传感性能,是因为该聚合物弹性体合成压阻薄膜顶部表面,具有自形成碳纳米管包覆型微结构。
经过测试,该触觉传感器可以准确检测蜜蜂的足迹以及人类手腕的脉搏。此外,通过集成 64×64 压力传感器阵列和基于忆阻器的内存计算芯片,研究人员还制作了有着信号传感和识别能力的智能触觉系统原型,后者在手写数字和汉字识别实验中分别实现了 98.8% 和 97.3% 的软件等效分类准确率。

搭载自适应动态规划平衡控制技术,提高机器人保持平衡的能力
迈步动作看似简单,实则不易达成,需要将机器人的动作划分为两个阶段,分别是单轮支撑阶段和双轮支撑阶段。
在单轮阶段,机器人在前进或跨越障碍物的过程中,存在单轮着地的情况,此时,轮腿既要控制行驶转向,又要保持动态平衡。在双轮阶段,地面和两个轮子之间存在着相对滑动,且还要在蹬地动作中完成能量的汇聚和注入。
这其中所涉及的机器人接触力和动力学特性是非常复杂的。
为攻克上述难题,研究者基于强化学习和自适应动态规划技术,提出了一种数据驱动的 VI 算法。这是基于学习的控制方法在轮腿式机器人平衡中的首次应用,能够在缺乏精确动力学特性的情况下,生成相对稳定的双轮迈步动作。
同时,研究者从理论上分析了数据驱动 VI 算法的收敛性和自适应最优控制器对机器人闭环稳定性的影响,并在不同情况下开展了物理实验,从多个方面助力 Ollie 完成全新的进化升级。
作为一个非线性欠驱动系统,为轮腿机器人设计平衡控制器是非常困难的。目前人们大多运用基于模型的线性二次调节器技术来解决平衡问题,但这种方式高度依赖动态模型的准确性。
由于轮腿机器人机械结构复杂,很难建立精确的动力学模型。同时,当机器人的物理参数发生变化,为保证稳定性,基于模型的控制器的参数也需要随之进行调整,这也在很大程度上阻碍了机器人的自动化发展。
为了让机器人的双轮平衡更具环境适应性,研究人员为 Ollie 搭载了自适应动态规划平衡控制技术,保证轮腿机器人能够拥有最优的平衡控制能力。
因此,在运送球形物体的复杂搬运任务中,Ollie 表现十分出色。它既可以感知到球的相对位置和运动状态,又可以实时收集并完成数据的处理,在多种地形条件下都能实现头部控制物体,下部保证平衡的能力。
据悉,对于目前已拥有感知接触能力和稳定运动能力的 Ollie,研究人员会继续承担机器人本体设计、系统集成、广泛感知、控制规划等多方面的研究任务,不断推进技术的积累和升级。
(转载自“DeepTech深科技”公众号)
